A fixação dos seres humanos em criar maquinas com a aparência humana vem desde a Idade Média, com o surgimento dos primeiros autômatos percussores dos robôs, que eram basicamente estruturas mecânicas utilizadas para o entretenimento da realeza. As obras de ficção, quando tratam de robôs, trazem sempre uma figura humanoide, enraizando-a no subconsciente popular. Desde o surgimento do termo “robô”, em 1920, na peça teatral de ficção científica R.U.R. (Robôs Universais de Rossum) escrita pelo tcheco Karel Capek, os robôs são apresentados na figura de humanoides. Mas seria possível a criação de robôs com características mais próximas das humanas como mostrado em muitas obras fictícias? É o que empresas e cientistas vêm tentando desenvolver há décadas, e nos últimos anos conseguiram avanços surpreendentes que trazem fascinação e receio sobre o tema.

Autômato medieval: bit2geek
Você venderia sua aparência física para um robô?
Sim, esta proposta é real! Recentemente a empresa de robótica russa Promobot anunciou o pagamento de 180 mil Euros para quem aceitar vender sua aparência física e sua voz para a utilização em seus humanoides. Soa como ficção cientifica, mas já é uma realidade. O objetivo da empresa é a utilização destes robôs como atendentes em lojas, empresas e até mesmo sua utilização doméstica como acompanhantes de idosos. O robô é capaz de reproduzir até 600 expressões faciais do humano “pai” e manter diálogos via Inteligência Artificial com a voz “real” aquisitada.

Robo-C: Imagem de divulgação Promobot
Na última edição da Consumer Electronics Show (CES), outro robô ganhou os holofotes. AMECA chocou o mundo pelo realismo de suas expressões faciais, mostrando o avanço da robótica, realizando a reprodução de movimentos complexos com um realismo assustador. Mesmo AMECA sendo claramente um robô, tendo partes expostas sem “pele” sintética, nosso cérebro se confunde ao ver uma representação tão fidedigna de certas expressões, gerando até mesmo um desconforto. Em contraponto, o ATLAS, da Boston Dynamics, robô bípede com uma destreza capaz de realizar movimentos complexos até mesmo para muitos humanos, não nos gera essa estranheza.


AMECA e ATLAS: Imagem de divulgação Engineered Arts e Boston Dynamics
Existe uma explicação para tal efeito: o Vale da Estranheza. Em 1970, Masahiro Mori, professor de robótica do Instituto de Tecnologia de Tóquio, deu origem a este conceito. Segundo Mori, a sensação de estranheza é resultante da capacidade dos seres humanos de identificar a diferença entre a movimentação do objeto antropomórfico inanimado em relação à movimentação de um ser humano saudável. Ele percebeu que, quanto mais avanços obtêm-se ao fazer um robô parecer com um ser humano, a afinidade por eles aumenta, até que cai abruptamente em um vale, causando a sensação de estranheza. Este conceito foi criado principalmente para o desenvolvimento da robótica, porém também é utilizado na indústria de animações e jogos. O grande desafio é conseguir semelhança tamanha, indistinguível ao cérebro humano, de modo a romper o vale e assim não gerar a estranheza.
Vale da Estranheza: W.DISNEY/EVERETT/REX FEATURES
Além de ter que superar o Vale da Estranheza, para que um robô possa ser semelhante de modo que não consiga ser distinguido aos seres humanos, deverá ser aprovado também no conceito do teste de Turing. Desenvolvido por Alan Turing, considerado o pai da IA, em 1950, seu conceito consiste na capacidade de uma máquina exibir comportamento inteligente equivalente a um ser humano, ou indistinguível deste. Alguns softwares já conseguiram ser aprovadas no teste, o que para os dias atuais e com o conhecimento disponível sobre IA, não é um desafio tão grande, vide os chatbots existentes. Porém, para um “Humano Artificial” passar no teste seria muito mais complexo, necessitando de um super computador extremamente compacto para ser o cérebro do robô, capaz de processar a infinidade de informações recebidas e atuadores com tempo de resposta imperceptível, tanto para fala, quanto para as micro expressões e movimentos que são gerados durante a interação com um humano real.
O filme Ex Machina (2014) aborda exatamente essa hipótese: AVA um super robô com todos os atributos aqui citados é submetido ao teste de Turing. No filme, AVA também está conectada ao banco de dados do maior buscador existente, alimentando recorrentemente sua IA.
AVA: Imagem de divulgação EX Machina (2014)
Quão distante a robótica está para avançar a este nível?
Quando Alan Turing criou o conceito de seu teste, ele não imaginou que um dia uma IA iria conseguir supera-lo. Atualmente temos um avanço exponencial no desenvolvimento de IA cada vez mais complexas, e o interesse cada vez maior de empresas e pesquisadores sobre o tema. Em nível de software a evolução está ocorrendo muito mais rápida que nas tecnologias de Hardware. Não que já exista uma IA capaz suprir todas as necessidades de uma super máquina neste nível, porém o gap tecnológico está cada vez menor. O gargalo tecnológico é hardware, tanto eletrônico quanto mecânico e também de fonte energética.
Em um paralelo com a robótica, imagine a anatomia humana e toda sua complexidade, em uma simplificação hipotética, onde os ossos são as estruturas mecânicas de sustentação e os tendões e cartilagens fazem parte das estruturas flexíveis e juntas do corpo humano. Para a utilização na robótica, materiais compósitos extremamente resistentes, resinas flexíveis, elastômeros e também ligas metálicas especiais como o titânio já são uma realidade e estão à disposição, não sendo um grande desafio devido aos e desenvolvimentos obtidos na área de materiais. Outra área de estudo cada vez mais utilizada na robótica e essencial para o desenvolvimento de humanoides é a Biomecânica.
Bom a estrutura mecânica básica do corpo humano já é algo viável, mas como são realizados os movimentos? No corpo humano, os músculos são os responsáveis por essa tarefa, que para robótica são os atuadores. Existe uma gama variada de atuadores, sendo basicamente divididos em dois tipos: rotativos ou lineares, que podem ser hidráulicos, pneumáticos ou elétricos. Por mais que a tecnologia dos atuadores tenham avançado muito, este componente é um dos principais gargalos para o desenvolvimento de um super robô com características humanas.
Os atuadores convencionais utilizados na robótica são compostos por uma fonte de torque/força e um amplificador mecânico caixa de reduções, guias e fusos e ou pistões, o que para sua utilização anatômica “perfeita” é um complicador. Atualmente já existem atuadores mais modernos que são chamados de “músculos artificias” que tentam reproduzir os “músculos reais”. Os músculos artificiais pneumáticos conseguem entregar uma força considerável, porém dependem de linhas de alimentação e um compressor, o que inviabiliza sua utilização para esta aplicação.
Entretanto os músculos artificiais elétricos são promissores, funcionam com a aplicação de uma alta tensão em polímeros, realizando uma contração assim como no corpo humano. Mas esta tecnologia ainda precisa de avanços, pois a força entregue ainda é relativamente baixa, comparado com seu consumo energético, tendo assim uma baixa eficiência. Os estudos são promissores e no futuro poderão ser uma solução tecnológica para o tema.
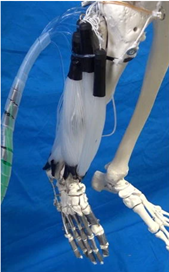
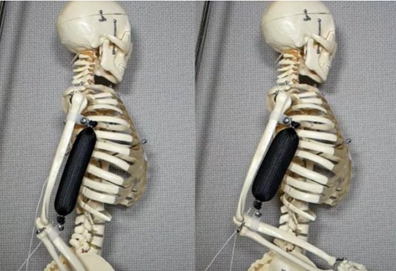
Músculos Artificiais: Suzumori Endo Robotics Laboratory e Aslan Miriyev/Columbia Engineering
A parte sensorial do super robô humanoide deverá ser composta por uma combinação complexa de sensores, que vão alimentar as ações dos atuadores e dar feedback para o sistema de controle fechando sua malha. O grande desafio está em reproduzir o maior órgão dos seres humanos, a pele, que possui mais de 5 milhões de receptores responsáveis pelas sensações de temperatura e contato. A tarefa possui tamanho grau de dificuldade que somente em 2021 o funcionamento destes receptores no corpo humano foi melhor compreendido, gerando o Prêmio Nobel de medicina e fisiologia para o americano David Julius e ao libanês Ardem Patapoutian. Existem algumas linhas de pesquisas sobre o tema com recentes avanços como ACES (Electronic Asynchronous Coded Electronic Skin) e o AISkin, mas ainda existe um longo caminho a ser percorrido para que estas tecnologias se tornem viáveis.
O cérebro desta super máquina deverá ser capaz de processar todas as informações dos milhões de sensores, responder aos atuadores e abrigar o software de AI, tarefa nada simples para os computadores disponíveis atualmente. Os candidatos mais promissores para tal tarefa serão os super computadores quânticos em desenvolvimento. Enquanto na computação convencional um bit é binário, restrito ao zero e um, um qubit pode representar várias combinações de zero e um ao mesmo tempo, possibilitando um aumento exponencial em nível de processamento.
Não podemos imaginar esse complexo sistema robótico sendo alimentado por um gerador a combustão ou sendo recorrentemente recarregado na tomada como os veículos elétricos e aparelhos eletrônicos que utilizam baterias de lítio íon, o mesmo irá necessitar de uma fonte estável com alta densidade energética, taxa de descarga, alto número de ciclos e capacidade para sua autonomia. Atualmente as baterias representam um grande gargalo tecnológico restringindo muitos avanços, sendo o principal problema o baixo número de ciclos de recarga, pois após a realização de cada ciclo ocorre uma diminuição de sua capacidade. Muitos estudos estão sendo realizados a fim de solucionar este problema e trazer para o mercado uma nova geração de baterias capaz de suprir as necessidades tecnológicas atuais, dentre eles se destacam as baterias de estado sólido que prometem quadriplicar o número de ciclos úteis comparado com as atuais de Lítio íon.
Fazendo novamente um paralelo com a ficção, imagine se fosse possível a criação de um “Reator Arc” como o do Homem de Ferro? Esta seria a fonte de energia ideal para o “Humano Artificial”, energia proveniente de uma fusão nuclear estável que não gera energia térmica (calor) e sim puramente energia elétrica.
Ainda estamos muito distantes tecnologicamente para o desenvolvimento deste super robô, os avanços no campo da robótica continuam evoluindo e como é possível notar, as tecnologias de hardware são interconectadas, necessitando de uma evolução plural para a resolução dos gargalos tecnológicos atuais. Pode-se imaginar o que está por vir, mas precisar quando todas essas disrupções estarão disponíveis é impossível.
Este artigo foi produzido por Daniel Freitas, Consultor de Sistemas Robóticos na Ouro Negro S.A. e colunista da MIT Technology Review Brasil.